Abstract
字节Seed团队提出了 Value-Calibrated PPO (VC-PPO), 用于解决PPO的value initialization bias 以及 reward signal decay 问题. 具体来讲:
- VC-PPO增加了 value pretraining 来解决 value initialization bias 的问题
- VC-PPO分离了 actor 和 critic 的GAE的计算,避免了 reward signal decay 的问题
Introduction
已有的reasoning model的训练方法,主要包括两个个stage:
- SFT: 这个阶段主要使用了一些标注好的long CoT数据,初步激活模型的reasoning能力(参考KImi-VL)
- RL: 这个阶段使用收集到的数据使用RL算法进行训练,任务包括math, code, logic reasoning等
已有PPO算法在处理Long CoT任务时,存在的问题在 DAPO 中已经介绍过了,GRPO的解决方式为 使用leave-one-out estimate来替换value model. 但是GRPO相比于PPO能够提供token级别的奖励来说,只能提供response level的奖励,因此限制了模型的性能。
Preliminary
Preliminary包括MDP, RLHF, PPO三个部分,RLHF和PPO我们在 DAPO 中已经介绍过了,这里不再赘述。
Token-level MDP
给定prompt $x$ 和 response $y$, 我们可以将 $x$ 和 $y$ 分解为 token 序列,比如 $y = y_1, y_2, \cdots, y_n$, 其中 $y_i\in\mathcal{A}$, $\mathcal{A}$ 是我们的词表。
我们将 token-level MDP定义为:
$$ \mathcal{M} = \langle \mathcal{S}, \mathcal{A}, P, r, d_0, \omega \rangle $$其中:
- $\mathcal{S}$ 是状态空间,表示当前的token序列, $t$时刻的状态可以表示为 $s_t = (x, y_1, y_2, \cdots, y_t)$
- $\mathcal{A}$ 是动作空间,表示下一个token, $t$时刻的动作可以表示为 $a_t = y_{t+1}\in\mathcal{A}$
- $P$ 是状态转移概率,表示在 $t$时刻,从状态 $s_t$ 转移到状态 $s_{t+1}$ 的概率
- $r$ 是奖励函数,表示在 $t$时刻,从状态 $s_t$ 采取动作 $a_t$ 转移到状态 $s_{t+1}$ 的奖励
- $d_0$ 是初始状态分布,表示初始状态 $s_0$ 的概率分布
- $\omega$ 是终止状态分布,表示终止状态 $s_n$ 的概率分布,通常表示
<eos>token
方法
首先作者分析了一下为什么 PPO 在处理 long CoT 任务时效果不佳。
PPO的传统设置为:
- 将GAE的参数 $\lambda$ 设置为 0.95
- 使用一个 reward model 来初始化 value model
一方面,作者认为,$\lambda=0.95$ 是为了减少模型在 Mujoco 以及 Atari 等环境中的variance,但是对于Long CoT任务,这个设置会导致模型缺乏足够的探索能力。
另一方面,作者认为 reward model 和 value model 虽然都是提供关于 response 的信息,但是他们之间还是存在一些差距的。作者给出了使用PPO来进行 long CoT 任务相关的实验结果

可以看到,随着训练的进行,模型的context length以及在AIME benchmark上的表现都出现了下降。
在本文中,作者主要是在 verifiable tasks 上进行实验,答案的正确性与 response length 长度关系不大,因此, response length 可以反应模型的训练情况。 作者绘制了训练过程中, value 和 advantage 与 token position 的关系图
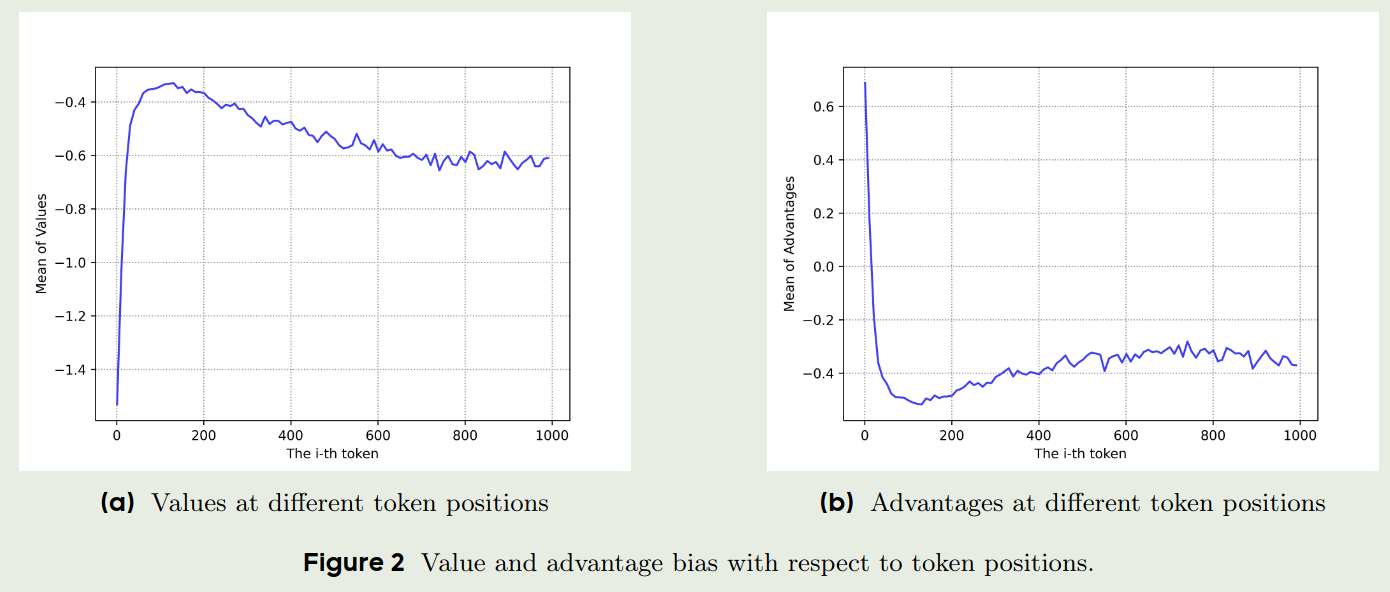
从上图可以看到,value 和 advantage 更倾向与给最初的 token 更高的 bias, 作者认为出现这个情况的原因是 value model 和 reward model 的目标并不匹配。 reward model 的目标是给 $\omega$ 也就是 <eos> token reward, 对于一开始的 token, reward model会给出比较低的奖励;而 value model 的目标是给整个 response 一个奖励,因此,value model 会倾向于给最初的 token 更高的奖励。我们对 GAE 进行改写得到:
从上式可以看到,一开始 $r_{t+i}$ 的值会比较小,而 $V(s_{t+i})$ 的变化比较大,因此,一开始的 token 的 advantage 会比较大,这个 bias 会持续影响整个 trajectory。
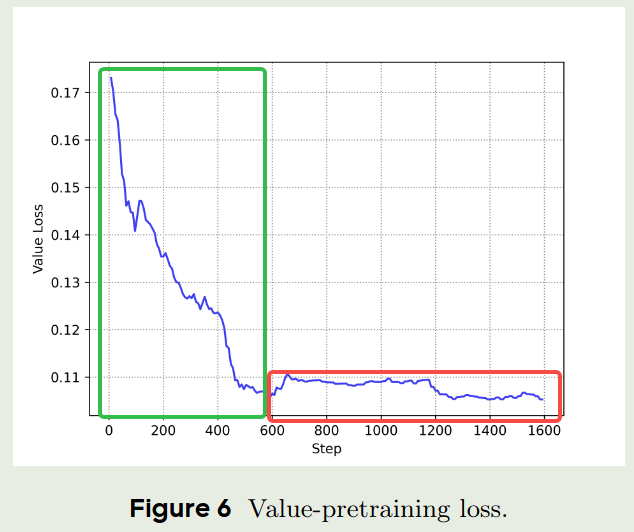
为了解决这个问题,作者提出了 value-pretraining, 也就是对value model 进行离线与训练,直到其收敛到一个具体的 policy 上。具体训练步骤为:
- 基于一个policy, 如 $\pi_{\mathrm{sft}}$ 进行采样,然后更新value model ($\lambda=1.0$)
- 基于收集到的数据训练 value model, 直到 value loss 或者 explain variance 收敛
接下来,在训练 value model 时,我们还需要考虑 variance reduction 的问题。作者首先改写了 GAE 的公式:
$$ \hat{A}_t = \begin{cases} \sum_{i=0}^{T-t-1} \lambda^{i} \left( r_{t+i} + V(s_{t+i+1}) - V(s_{t+i}) \right)+V(s_t) & \text{if } \lambda < 1.0 \\ \sum_{i=0}^{T-t-1} r_{t+i} & \text{if } \lambda=1.0 \end{cases} $$可以看到,当 $\lambda < 1.0$ 并且 $T-t-1$ 比较大时,<eos> token 的reward就非常接近于0了,作者通过实验验证了这一点。
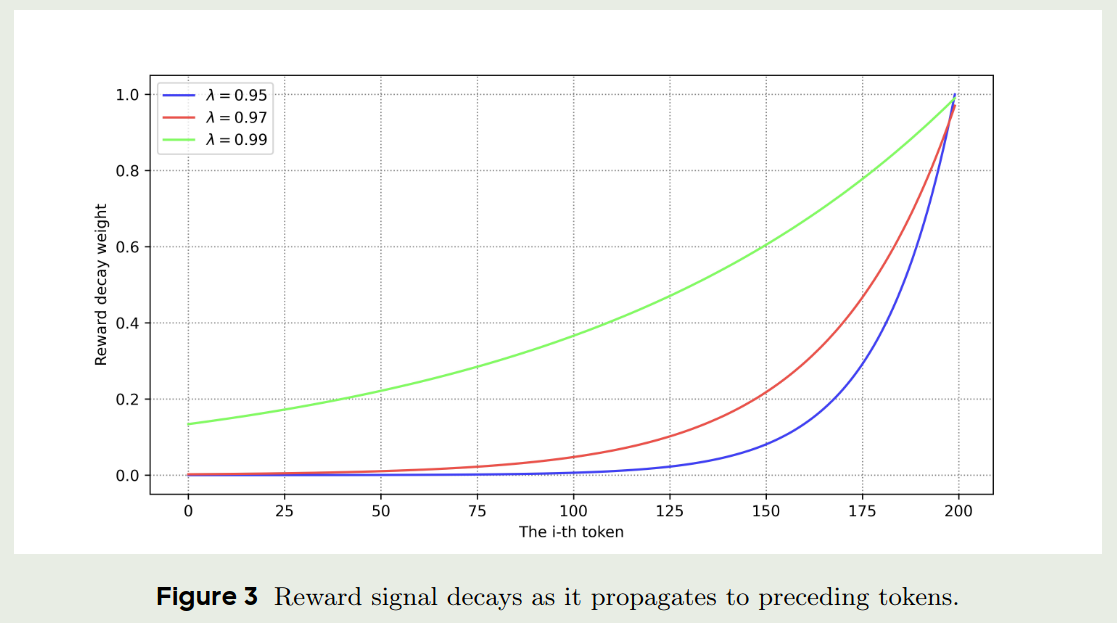
可以看到,当我们降低 $\lambda$ 时,reward signal 的稀疏性会显著增加,从而提高了模型的训练难度。
但是,我们又不能不使用 variance reduction, 因为这会导致训练的不稳定性。 作者从 TD error 的角度分析了 variance:
$$ \begin{aligned} \mathrm{Var}[A_{t}^{\lambda}] &= \mathrm{Var}\left[\sum_{i=0}^{T-t-1} \lambda^{i}\delta_{t+i}\right] \\ &= \sum_{i=1}^{T-t-1} \lambda^{2i} \mathrm{Var}[\delta_{t+i}] + 2\sum_{i=1}^{T-t-1}\sum_{j=0}^{i-1} \lambda^{i+j} \mathrm{Cov}[\delta_{t+i}, \delta_{t+j}] \end{aligned} $$因为 $\lambda\in[0,1]$, 因此未来的 TD error 会衰减的更快,因此就降低了 advantage 的 variance.
那么如何在降低variance的同时,又不至于使得 reward signal 过于稀疏呢?作者的解决方案是分离GAE的计算,也就是将 GAE 的计算分为两部分:
$$ G_{t:t+h} = \begin{cases} \sum_{i=0}^{h-1} r_{t+i} + \bar{V}(s_{t+h}) & \text{if } t+h通过这种方式,我们就可以避免 value function 对 policy gradient 的影响,因而我们可以对 value model 和 policy model 使用不同的 $\lambda$ 进行训练。
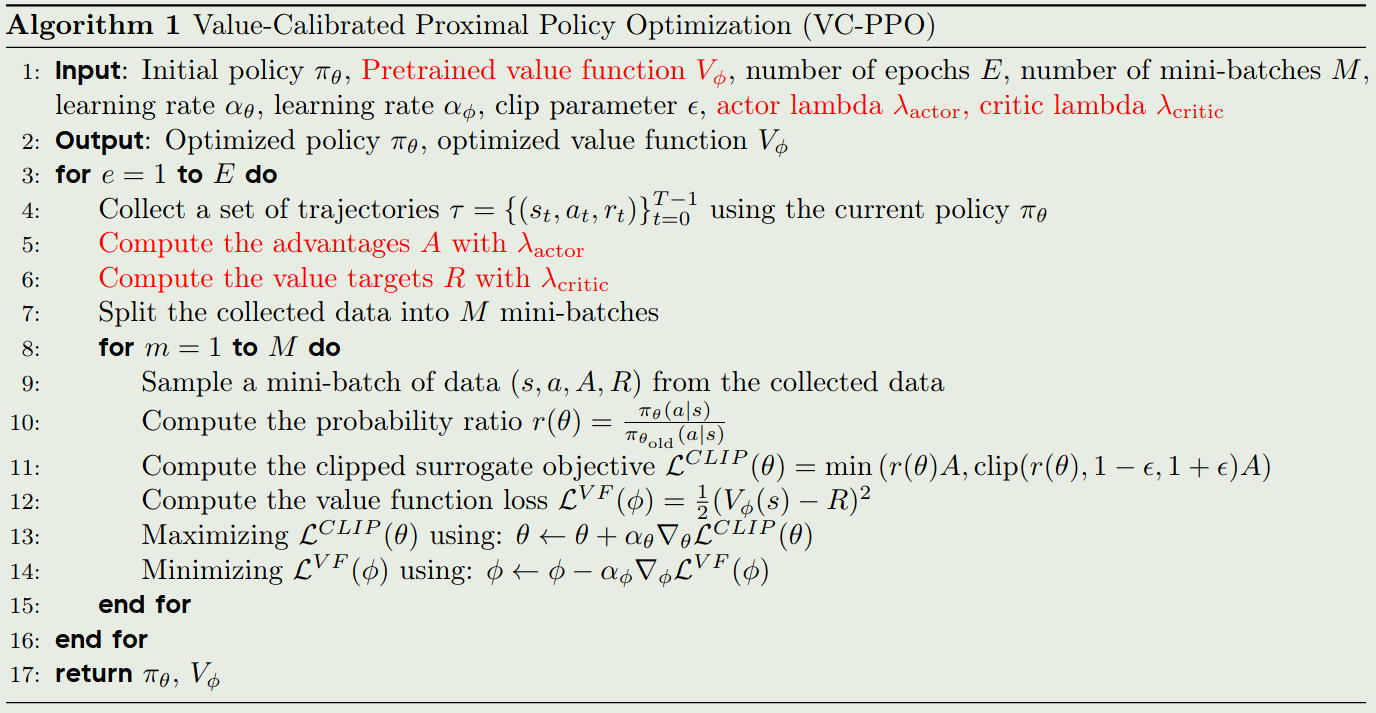
最终,我们就可以得到 VC-PPO 的算法:
实验
setup
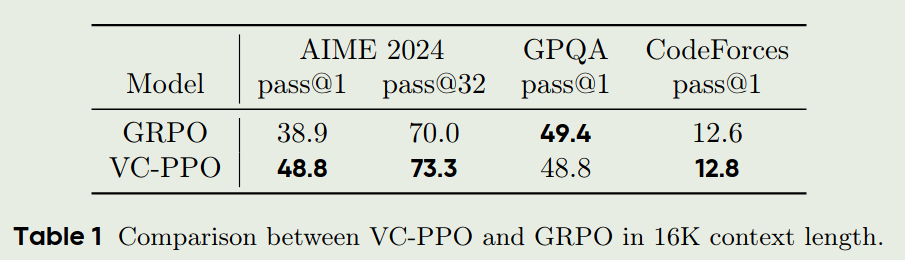
- 作者在AIME, GPQA 以及Codeforces三个数据集上进行评测
- 作者首先进行了code-start,作者构建了一批样本然后要求模型在
<thinking>和</thinking>之间生成推理过程,然后使用Verifier来针对答案部分提供奖励,正确则奖励为1,错误则奖励为-1 - RL的Baseline使用的是PPO
- value pretraining 时,作者将 GAE的 $\lambda$ 设置为 1.0, 其他参数与PPO一致
- 对于decoupled GAE,作者使用 $\lambda_{\text{critic}}=1.0$, $\lambda_{\text{actor}}=0.95$
实验结果
实验结果如下图所示
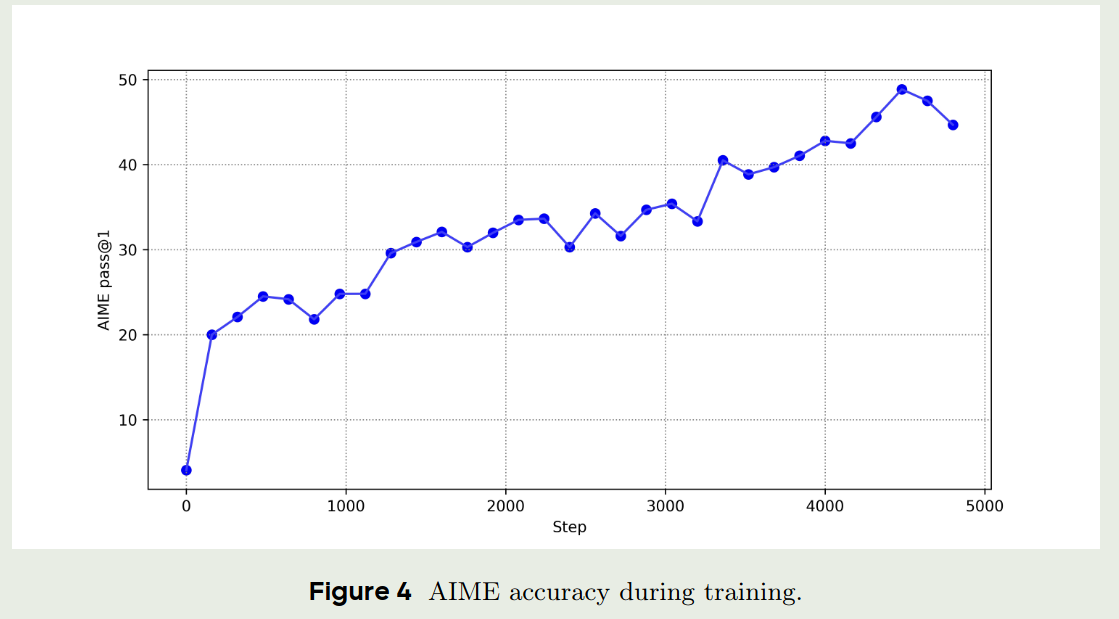
作者还分析了以下模型在AIME数据集上随着训练步数增加准确率的变化情况
Ablation Study
作者首先探究了 value pretraining 以及 decoupled GAE 对于模型性能的影响
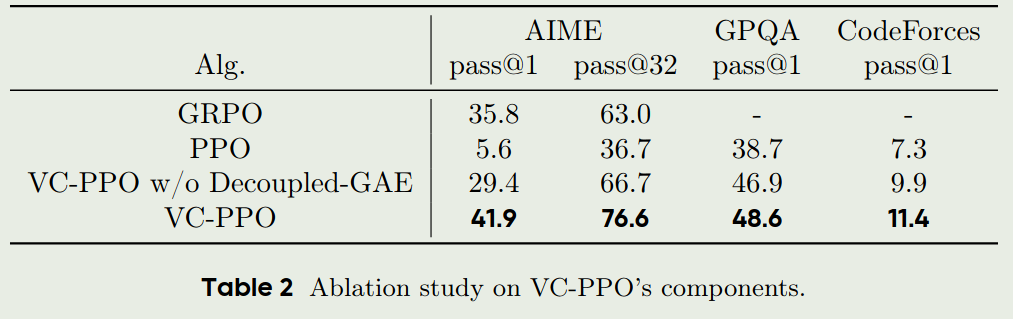
从上图可以看到,直接使用PPO并不能提升模型的表现,而使用value pretraining 以及 decoupled GAE 能够显著提升模型的表现。
作者接下来探究了不同的value pretraining steps对模型的影响,结果如下图
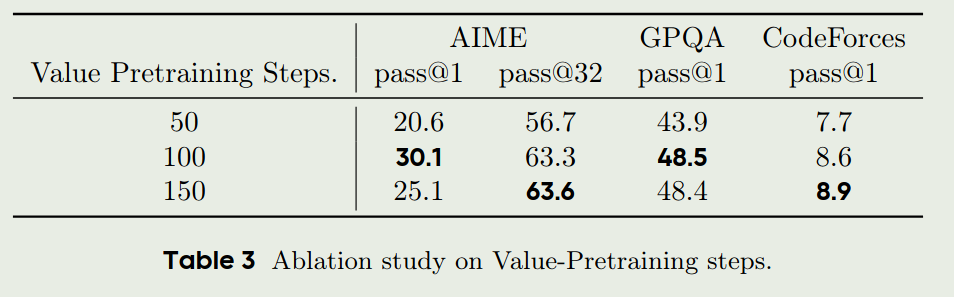
从上表可以看到,value pretraining 的训练步数并不是越多越好,随着训练步数的增加,模型可能会出现过拟合的现象。
最后作者还分析了以下 $\lambda_{\text{actor}}$ 对于模型性能的影响,结果如下图
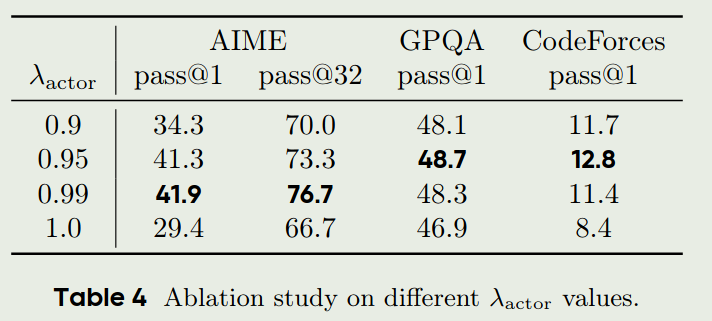
可以看到, $\lambda_{\text{actor}} =1.0$ 的效果是最差的,但是 $\lambda_{\text{actor}}$ 也不是越小越好,实验发现当 $\lambda_{\text{actor}} \in [0.95, 1.0)$ 时结果比较好
Findings
作者还提供了一些发现。
- 作者认为,在LLM中进行RL的训练与传统的RL训练不同,我们不再是从一个随机policy开始,而是从一个SFT之后的policy开始,因此,这就会引入 prior,我们需要将 value model 与 policy model 进行对齐,才能使得训练更加稳定。
- 作者认为,value pretraining 可以王value model 中注入先验知识,作者通过实验发现,value pretraining 的过程可以分为两个阶段,第一个阶段是random alignment,这个和传统的RL训练类似,第二个阶段是knowledge injection,这个阶段,value model 开始学习如何给重要的token 更高的权重。
- 作者发现, value model 倾向于更大的 $\lambda$, 因此结果会导致更小的 bias 和 更大的 variance. 而 policy model 倾向于更小的 $\lambda$. 这种差异启发我们需要使用一些基于policy gradient 的目标来训练 value model.
结论
本文提出了VC-PPO,一个通过使用value-pretraining 以及 decoupled GAE 来解决PPO 的 value initialization bias 以及 reward signal decay 问题的算法。